Part of the research in the lab involves publishing new research in the area of human-computer interaction, specifically as it relates to ongoing integration of craft techniques and engineering practices. Our most recent research, completed in collaboration with Kathryn Walters, Marianne Fairbanks, and 2022 Experimental Weaver in Residence, Etta Sandry studied how the AdaCAD software we have been developing brings about new drafting practices to weavers.
What is Parametric Design?
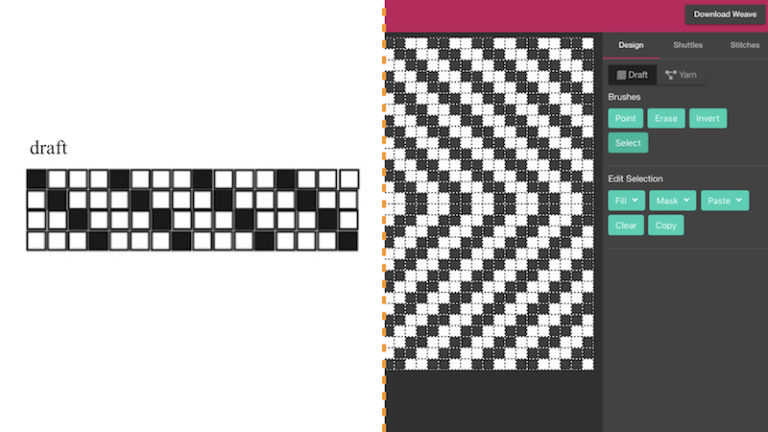
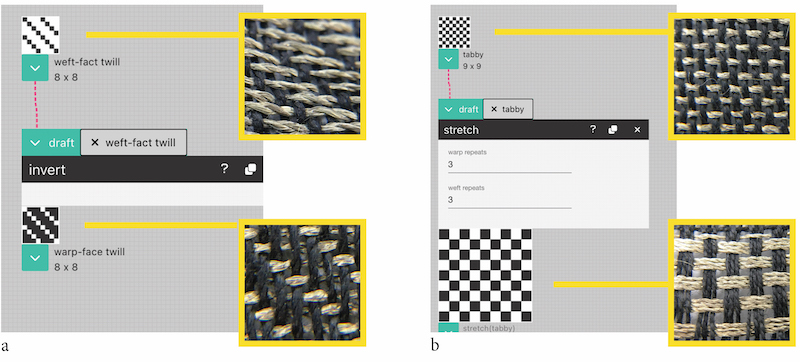
Recent versions of AdaCAD have implemented the framework of parametric design to the context of woven draft making. Parametric design is a form of design that creates dataflows between different parameterized operations that generate new outputs, in this case, weave drafts. Changing the parameters and/or elements within the dataflow directly changes the outcome. To put it another way, parametric design has you create and connect together different operations that result in drafts, rather than describing each pixel within a structure directly. For example, the “invert” operation takes an input draft and flips the value of all the interlacements. The “stretch” operation duplicates all of the interlacements in a pic/end the number of times specified.
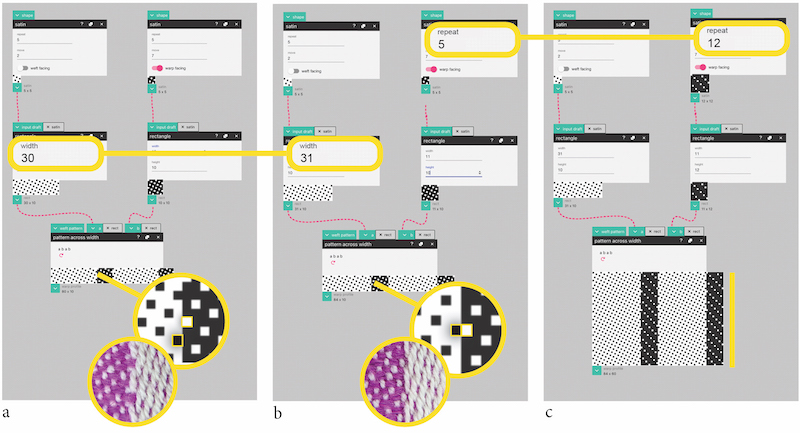
What operations do, then, is math on drafts. They take a draft as input, modify it in some user specified way, and spit out a new draft. More and more complex drafts can be created by chaining many operations together. In the example below, we create a series of operations that arrange different regions of satins next to each other. The designer can then change the satin structure, or width of the regions, to suit their weaving style or ensure clean edges between satin regions. AdaCAD will also calculate the number of pics needed such that the two satins will repeat at the same intervals when woven.
Making Custom Operations
With each collaborator, we developed a custom operation in AdaCAD to support their specific interests or practice.
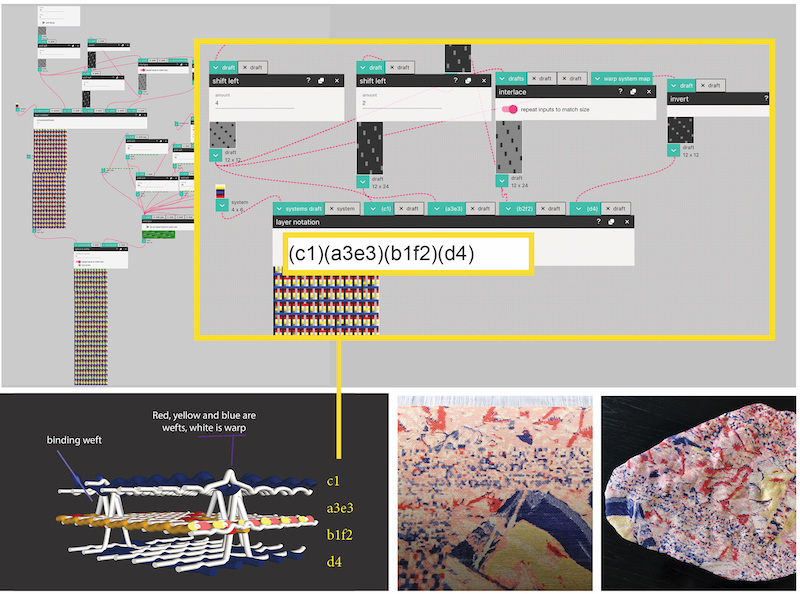
With Kathryn, we made an operation that converted her existing notation for layer relationships in a textile into a dynamic operation that could map structures onto those relationships. The notation system assigns each weft to a system (a, b, c or d) and each warp to a system (1, 2, 3, 4). Pairings of warps and weft system can be grouped and assigned layers by putting them in parentheses. The first parenthetical group represents the top /front face layer and each subsequent group represents a layer below. Kathryn then connects structures into the different layer groups to determine the structure of that layer, independent of the others. AdaCAD takes care of the drafting that ensures they are on the correct systems and layers.
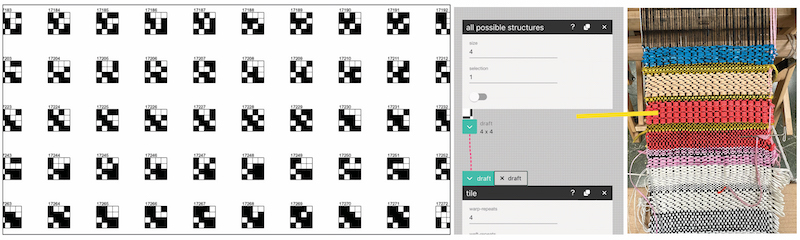
With Marianne, we developed the “all possible structures” function that uses the principle of combinatorics to systematically discover every possible combination of lifted and lowered heddles in a 4×4 structure (and there are 10s of thousands of them). AdaCAD lets you browse through every possibility, which Marianne started weaving on a shaft loom to study the effects of the different structures.
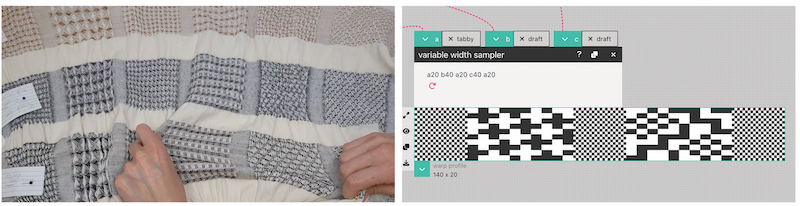
and with Etta, we developed a series of tools in AdaCAD that support direct-tie looms as well as techniques for sampling across the width of the cloth. The variable width sampler operation, shown below, allows you to use letters and numbers to describe the tiling of structures across the width of a draft. In the image below we have a20 b40 a20 c40 a20. Assigning tabby to a, and the structures to test to b and c, Etta could create and dynamically resize structural regions so that she could repeatedly weave them with different materials and study the effects.
Parametric Design as Weaving Notation
Through this research, we made an argument that parametric design could be best understood as a notation system for complex weaving that can help weavers formalize and document their draft making processes to both themselves and to other collaborators. It sparked our interest in notation systems more broadly, from sheet music to Fluxus event scores, to woven drafts, and how they foreground certain elements of the making process while leaving others to be considered at another time. And while it takes a bit of brain gymnastics to rethink drafting in this manner, it did come with some interesting new possibilities, for instance, to integrate different algorithmic processes into the design and to greatly lower the amount of time required to make quick changes to ones draft.
Taking significant inspiration from the Penelope Project and Ellen Harlizius-Klück’s article “Weaving as Binary Art and the Algebra of Patterns“, we felt like one of the primary benefits of a parametric design approach to weaving notation is to foreground the inherent algebraic nature of weaving to new audiences in a similar vein to how Harlizius-Klück argues that the jacquard punchcards made the algebraic thought processes of weavers legible to the designers of industrial machines. Notations, in this way, manifest the tacit in incomplete but rhetorically useful ways. In our case, it shows how weaving, and weavers, are performing incredibly complex operations using their own bodies, materials, and minds. It also represents these logics in a framework that is increasingly familiar to those in engineering design.
We are incredibly excited about this project, and the ability to collaborate with weaver’s whose practices continue to inspire us and we would like to continue developing AdaCAD to support weavers. If you are interested in learning more, you might consider attending one of following (or looking for talks recorded at these events) or just getting in touch. We’d love to hear from you.
Upcoming Events
April 22-28
Laura will present this research at the CHI Conference in Hamburg Germany
June 23-25
Laura will lead a panel with Kathryn Walters, Marianne Fairbanks, and Etta Sandry about AdaCAD at the Digital Weaving Conference.
June 26
We’ll host a AdaCAD Workshop at the Cleveland Public Library for those interested in attending.
Play with AdaCAD
Its free and always available online at adacad.org
Read the Full Paper
(its just a pre-print now and will be published in May 2023):
https://drive.google.com/file/d/13VaTk_I8aOXB16A7ZAGlzVq2arMPmNqO/view?usp=share_link